Si vous êtes intéressé par une explication plus visuelle et moins technique de la rentrée et de l'atterrissage de la navette spatiale, j'ai donné une conférence intitulée Comment faire atterrir la navette spatiale ... depuis l'espace lors de la rencontre Stack Overflow en octobre 2016.
Je n'ai remarqué cette question qu'il y a quelques jours, mais en tant que personne ayant une obsession malsaine pour spécifiquement les phases d'entrée et d'atterrissage des vols de navette, je peux dire qu'il y a beaucoup d'informations factuellement incorrectes dans les autres réponses ici. Voyons si je peux mieux l'expliquer.
D'abord, les deux questions faciles, auxquelles d'autres questions ont bien répondu, mais je vais également les inclure ici pour être complet:
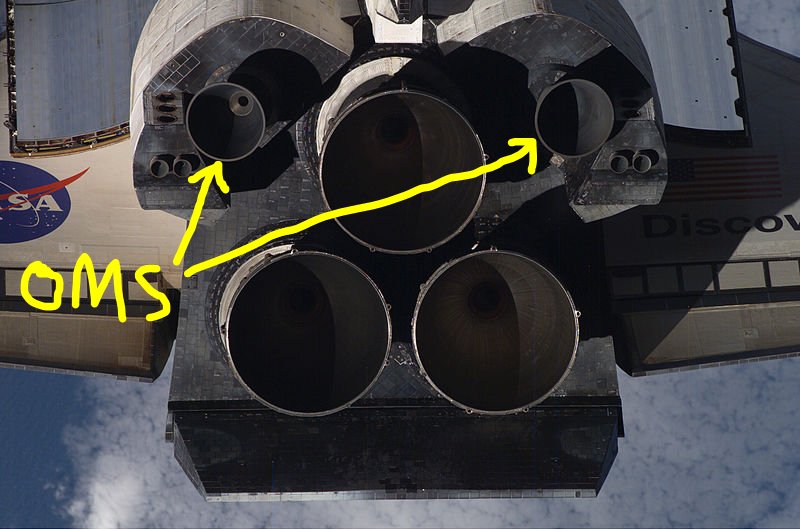
- La navette pourrait-elle effectuer une remise des gaz? Non. Les moteurs OMS sont trop faibles pour faire une différence dans l'atmosphère, et les moteurs principaux (lesquels seraient assez puissant) ne sont alimentés que par le réservoir externe orange qui est largué après le lancement.
- Où at-il atterri? 78 missions ont atterri au Kennedy Space Center, 54 (dont la première ) à la base aérienne d'Edwards et 1 à White Sands. Il y avait d'autres sites d'atterrissage désignés pour les urgences, mais aucun n'a jamais été utilisé.
Maintenant, pour la vraiment grande question de savoir comment la navette est rentrée et a atterri.
La source principale que je vais citer dans cette réponse est le Manuel de guidage d'entrée, TAEM et approche / atterrissage 21002 qui était un classeur utilisé pour la formation des astronautes. Malheureusement, je n'ai pas de lien vers celui-ci, mais il peut être obtenu sur nasaspaceflight.com via un abonnement L2 si vous êtes vraiment intéressé. Je vais abréger cette source en tant que ETAGW.
Mécanique orbitale
Tout d'abord, une leçon très rapide de mécanique orbitale. Afin de changer l'altitude de votre orbite, vous effectuez un changement de vitesse ($ \ Delta v $). Si vous augmentez la vitesse, vous augmenterez l'altitude, et si vous diminuez la vitesse, vous diminuerez l'altitude. Cependant, cet effet est le plus prononcé à 180 ° de la position où vous avez effectué le changement. Après une orbite complète à 360 °, vous serez à peu près à la même altitude à laquelle vous avez commencé.
Ceci illustre l'effet:

En partant de l'orbite circulaire (noire), si vous ralentissez au point A, vous pourriez vous retrouver avec quelque chose comme l'orbite rouge, et si vous accélérez, vous pourriez vous retrouver avec quelque chose comme l'orbite bleue.
Deorbit Burn
En raison de la nature de la mécanique orbitale, comme décrit ci-dessus, vous souhaitez effectuer votre manœuvre de désorbitation du côté opposé de la planète à partir de votre site d'atterrissage prévu. Cela se produisait généralement au-dessus de l'océan Indien pour un atterrissage au centre spatial Kennedy en Floride.
La brûlure elle-même a été effectuée avec la navette volant en premier et la face blanche (supérieure) tournée vers la Terre (bouclier thermique / noir côté tourné vers l'espace). Les deux moteurs OMS (système de manœuvre orbitale) ont été utilisés pour accomplir le $ \ Delta v $ requis (entre 200 et 550 ft / s selon l'altitude de départ). La brûlure prenait généralement environ 2,5 à 3 minutes. Cela abaisserait le périgée (point le plus bas d'une orbite autour de la Terre) à quelques kilomètres du sol (ayant du mal à trouver une source, mais je semble me souvenir qu'il était d'environ 30 à 40 milles), ce qui était suffisant pour assurer la trajectoire orbitale les amènerait dans une atmosphère épaisse.
 Source de l'image
Source de l'image
Les moteurs OMS sont essentiellement des versions plus grandes des jets RCS (système de contrôle de réaction). Les jets RCS ont été utilisés pour les changements de rotation (attitude) et de petite translation (vitesse dans une direction donnée). Les OMS ont été utilisés pour effectuer des changements orbitaux.
Les deux systèmes ont brûlé le même mélange hypergolique (monométhylhydrazine (MMH) et tétroxyde de diazote (N2O4)). Si le système OMS avait échoué, les jets RCS auraient pu, en théorie, être utilisés pour ralentir suffisamment la navette pour la rentrée.
Nose Flip
Certaines réponses ont dit que l'orbiteur tanguerait vers le bas 140 ° pour le flip. Ceci est une erreur. Une fois la manœuvre de désorbit terminée, l'orbiteur piquait vers le haut d'environ 220 ° jusqu'à ce qu'il atteigne un angle d'attaque à cabrer de 40 ° (appelé "assiette EI -5" car il doit être en cette attitude par au moins cinq minutes avant l'interface d'entrée).
Ils ont environ 20 minutes entre la brûlure de désorbitation et EI-5, donc il y a beaucoup de temps pour lancer dans les deux sens. Le nez vers le haut était probablement préféré car les évents d'échappement de APU pointent vers le haut près de la queue. Cela amène naturellement l'orbiteur à vouloir se cabrer lorsque les APU fonctionnent.
Pendant ce cabrage, ils tireraient les jets RCS avant pour déverser tout le carburant vers l'avant, à moins que cela ne soit nécessaire pour des raisons de centre de gravité. Les jets RCS avant n'étaient pas utilisés lors de la rentrée, et le déversement du carburant réduit les dangers potentiels pour les astronautes.
Une fois en position, le guidage d'entrée en boucle ouverte commencerait, maintenant l'orbiteur à 0 ° de roulis (ailes level), 0 ° de lacet et 40 ° d'angle d'attaque (alpha).
Interface d'entrée
La NASA définit l'interface d'entrée (EI) comme une altitude de 400 000 pieds. Il n'y a pas de limite dans l'atmosphère, mais c'est autour de l'altitude où ses effets commencent à devenir directement détectables.
Virages en S
Certaines réponses ont affirmé que la navette utilisait S -vire dans le but de ralentir. C'est une explication très courante, mais trop simplifiée et sans doute inexacte.
"La prochaine fois que vous entendez quelqu'un parler de la navette faisant des inversions de roulis pour évacuer de l'énergie, n'écoutez pas. La navette effectue des inversions de roulis car elle a une très petite enveloppe alpha. " - ETAGW 2.8.1 (l'accent est mis sur la source originale)
Comme pour tout avion, les ailes de la navette génèrent de la portance. Au fur et à mesure que l'atmosphère se densifie, les ailes vont générer plus de portance, et cette portance vers le haut ralentira la vitesse de descente. En fait, si la navette maintenait une assiette au niveau des ailes, elle finirait par gagner d'altitude, ce qui la ferait "sauter" plusieurs fois dans l'atmosphère jusqu'à ce qu'elle soit suffisamment lente pour passer. Et bien que techniquement une rentrée par sauts soit possible, elle serait très difficile à contrôler avec précision.
Donc, à la place, quand le taux décent commence à ralentir, la navette entre dans une banque. En contrôlant l'angle d'inclinaison, ils peuvent contrôler la portance vers le haut que les ailes génèrent et, par extension, contrôler leur vitesse de descente.
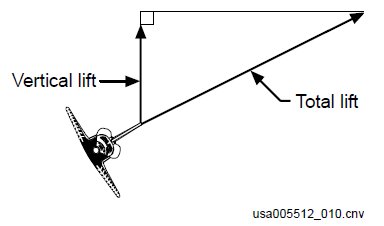
ETAGW Figure 2-5 illustrant le vecteur de levage.
Ou bien sûr, avec le vecteur de levage pointé sur le côté plutôt que vers le haut, la navette va démarrer tourner. En raison de la vitesse incroyable, le rayon de virage est énorme, mais il tourne néanmoins progressivement, et l'orbiteur développe une erreur d'azimut (la différence entre la direction actuelle de l'orbiteur et la direction vers le site d'atterrissage).
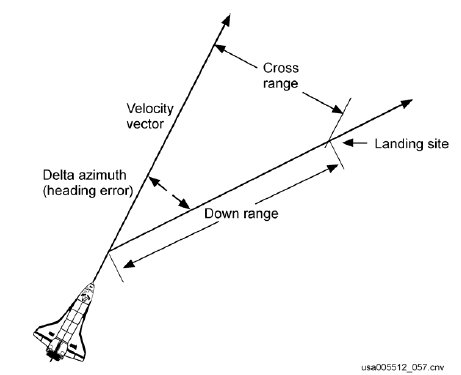
ETAGW Figure 2-3 illustrant une erreur d'azimut.
Pour corriger cette erreur d'azimut ($ \ Delta z $), l'orbiteur effectue des "inversions de roulis". En d'autres termes, il tourne dans l'autre sens. Ces virages créent la piste de rentrée des virages en S.
La première inversion se produit toujours à 10,5 ° $ \ Delta z $. Des inversions ultérieures se produisent à 17,5 ° jusqu'à Mach 4 quand il commence à descendre à 10 ° à Mach 3.
Remarque: tous les nombres mach donnés n'importe où dans cette réponse, ou référencés n'importe où dans les matériaux de la navette spatiale, ne sont pas de vrais nombres mach. La NASA utilise 1000 ft / s comme approximation de Mach 1, et tous les nombres de mach sont des multiples de cette vitesse.
Ranging
De toute évidence, le but ultime de la rentrée est pour atteindre votre piste prévue à une vitesse appropriée pour l'atterrissage. Bien que l'orbiteur ne dispose d'aucun moteur pour y parvenir, il dispose d'une énorme quantité d'énergie orbitale. Par conséquent, l'objectif devient la gestion de l'énergie, et plus spécifiquement, la gestion de la traînée.
L'orbiteur a deux façons d'affecter la traînée pendant l'entrée: changer l'angle d'attaque (alpha) et changer l'angle d'inclinaison.
L'angle d'attaque est le moyen le plus rapide d'augmenter ou de diminuer la traînée, mais l'orbiteur n'a été autorisé à dévier que de ± 3 ° de l'alpha nominal (40 ° pour la plupart des entrées). Il s'agit de la "très petite enveloppe alpha" mentionnée plus haut. La limitation est conçue pour assurer une protection thermique adéquate et maintenir le contrôle du véhicule.
Changer l'angle d'inclinaison, comme décrit ci-dessus, vous permet de contrôler votre taux de descente. Un angle d'inclinaison plus prononcé permettra d'atteindre plus rapidement de l'air plus épais et entraînera donc une traînée accrue. Un angle d'inclinaison moins profond maintiendra l'orbiteur dans un air plus mince plus longtemps et réduira la traînée. Cependant, il faut un peu plus de temps pour voir l'effet d'un changement de banque qu'un changement d'alpha.
Il existe également des limitations d'angle d'inclinaison car, encore une fois, vous ne voulez pas sortir de l'atmosphère, et vous ne voulez pas tomber dans l'air épais si vite qu'il dépasse la traînée maximale que le véhicule peut supporter, mais c'est une enveloppe plus grande que les limites alpha. En fait, aux premiers stades de l'entrée, l'orbiteur aurait même pu voler à l'envers (avec son vecteur de portance pointé vers la Terre) si nécessaire en raison d'une sous-brûlure à la suite d'un dysfonctionnement lors de la brûlure par désorbitation.
Phases de guidage d'entrée
Je ne vais pas entrer dans les détails sur le guidage d'entrée, mais je dirai que les principales considérations changent lorsque la vitesse et l'altitude changent, et le guidage d'entrée est divisé en phases pour refléter cela.
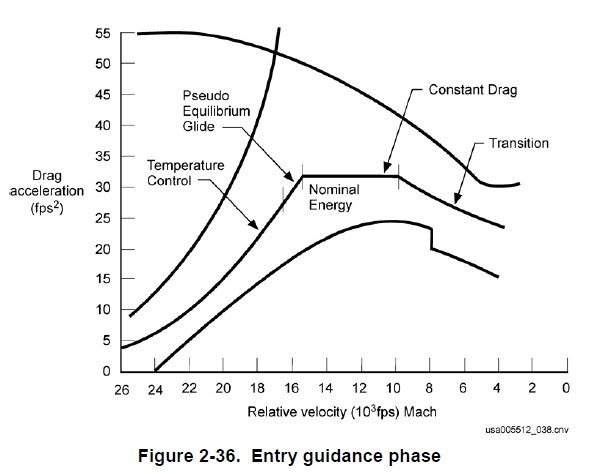
ETAGW
Dans le graphique ci-dessus, la ligne médiane représente le profil nominal. La ligne la plus basse est le profil de «plané à l'équilibre» qui est la quantité minimale de traînée que l'orbiteur doit maintenir pour éviter de prendre de l'altitude et de sauter. La ligne en haut à gauche représente une limite thermique (si l'orbiteur la dépasse, il risque de brûler). La ligne en haut à droite représente une limite de pression dynamique (si l'orbiteur la dépasse, il peut se rompre en raison des forces aérodynamiques).
- Préentrée : ceci est pris en compte guidage en boucle ouverte car tout ce qu'il fait, il maintient un lacet de 0 °, un roulis de 0 ° et un alpha de 40 ° jusqu'à ce que le facteur de charge total devienne 0,132 g (environ 3 pieds / s 2 de traînée), auquel point de guidage en boucle fermée commence.
- Contrôle de la température : commence au guidage en boucle fermée et se termine à une vitesse de Mach 19. Tente de maintenir une température constante dans les limites de conception du orbiteur.
- Glissement d'équilibre : fournit simplement un pont entre le contrôle de température et les phases de traînée constante. Il se termine lorsque la traînée atteint 33 ft / s 2 . Il est nommé comme tel car sa forme est similaire à celle du profil de glissement d'équilibre.
- Traînée constante : maintient une vitesse de traînée constante de 33 ft / s 2 sup> jusqu'à ce que la vitesse atteigne Mach 10,5.
- Transition : Conçu pour passer de la traînée élevée et de l'alpha d'entrée élevé à la traînée inférieure et à l'alpha inférieur requis pour que l'orbiteur vole plus comme un avion. Cette phase se termine à Mach 2,5 lorsque TAEM commence.
TAEM
TAEM signifie Terminal Area Energy Management. L'objectif à ce stade est d'aligner l'orbiteur avec la piste avec la bonne quantité d'énergie pour effectuer son approche finale. Encore une fois, je ne vais pas entrer dans une tonne de détails (n'hésitez pas à poser d'autres questions si vous le souhaitez), mais voici l'essentiel:
Si tout s'est bien passé dans la phase d'entrée, TAEM commencera à environ 82 000 pieds et 60 milles marins de la piste (trajectoire au sol prévue, pas de distance en ligne droite).
Alors que le guidage d'entrée utilise principalement l'angle d'inclinaison pour gérer l'énergie, TAEM utilise principalement l'angle d'attaque. En dessous de Mach 1, le speedbrake (un gouvernail fendu) contribue également à la gestion de l'énergie.
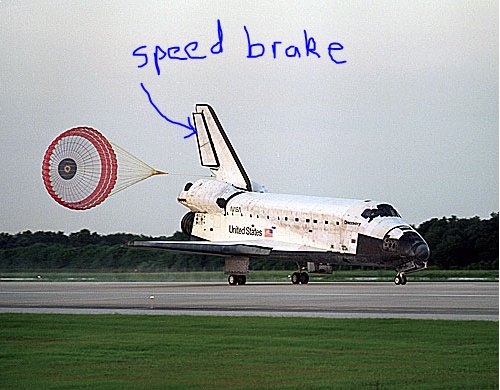
Source: NASA
Phases de TAEM:
- S-Turn : généralement pas obligatoire, mais la navette effectuera des virages en S si son énergie est trop élevée au début du TAEM (trop haut ou trop près de la piste).
- Acquisition : tourne l'orbiteur vers un point de tangence sur le cône d'alignement de cap (HAC), puis vole au niveau des ailes jusqu'à ce qu'il intercepte le HAC. Le point de tangence est appelé "waypoint 1" (WP1). Pendant cette phase, l'orbiteur ralentit en dessous de Mach 1, à quel point le commandant prend le CSS (control-stick Steering), qui est la chose la plus proche de la navette d'un mode "manuel".
- Alignement de cap : guide l'orbiteur autour d'un "cône" virtuel (voir schéma ci-dessous) jusqu'à ce qu'il soit aligné avec la piste. Ce n'est pas vraiment un cône, mathématiquement parlant, mais c'est le moyen le plus simple de le visualiser.
- Préfinal : établit l'orbiteur sur la pente de descente extérieure.
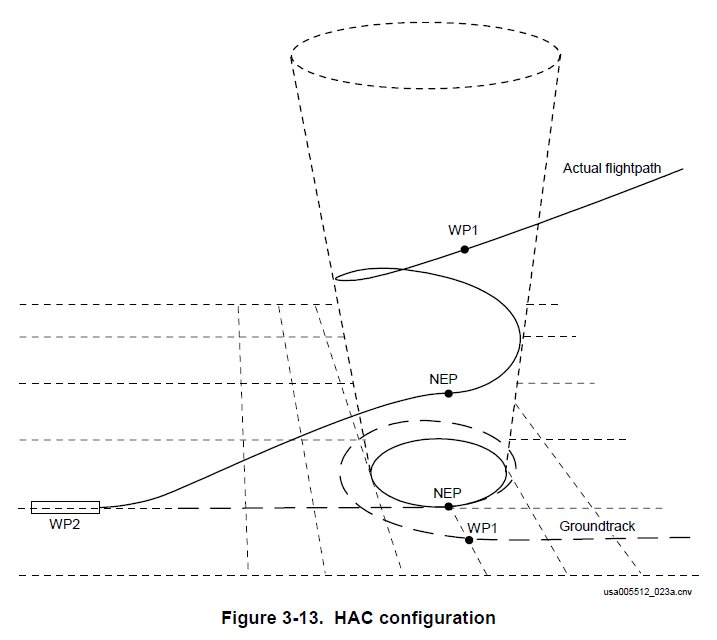
ETAGW Figure 3-13 illustrant le HAC.
Approche et atterrissage
La phase finale de guidage est appelée "Approche et atterrissage". Il commence lorsque l'orbiteur est en dessous de 10 000 pieds et établi sur la pente de descente extérieure (OGS), mais au plus tard à 5 000 pieds quelle que soit la pente de descente.
L'OGS était une pente de descente de 20 ° pour "léger" orbiteurs (poids brut inférieur à 222 000 livres) ou 18 ° pour les orbiteurs «lourds» (par comparaison, les avions normaux utilisent une pente de 3 °). Le poids lourd ou léger dépendait de ce qu'il y avait dans la soute. Le point de visée nominal de l'OGS était à 7500 pieds du seuil de piste, mais il y avait aussi un point de visée "rapproché" à 6500 pieds qui était utilisé en cas de vent de face suffisamment fort.
Le frein de vitesse a été utilisé pour maintenir 300 KEAS ( vitesse équivalente en nœuds - c'est en fait la même que la vitesse indiquée) sur l'OGS jusqu'à 3000 pieds, moment auquel il a calculé la vitesse de freinage nécessaire pour l'atterrissage. , et déplacé à cette position. Il recalculerait une fois de plus à 500 pieds.
À 2000 pieds, l'orbiteur entamerait une manœuvre "préflare" conçue pour passer de l'OGS à la pente de descente intérieure (IGS) peu profonde de 1,5 °. Ceci a été accompli avec un pull-up circulaire suivi d'une décroissance exponentielle sur l'IGS.
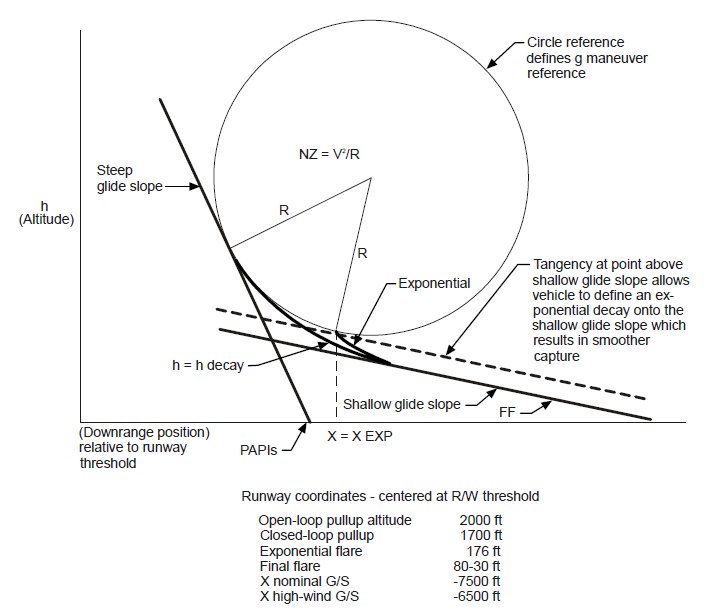
ETAGW Figure 4-8 illustrant la géométrie de préflare.
En réalité, l'IGS n'est pas suivi longtemps, et est plus un guide pour vous assurer de franchir le seuil de piste sur la bonne trajectoire et d'obtenir en position pour commencer l'arrondi final, qui est essentiellement le même qu'un arrondi d'atterrissage conventionnel dans un avion normal, sauf que la navette atterrit à un angle d'attaque beaucoup plus élevé (environ 8 °) en raison de ses ailes delta (plus similaires au Concorde ).
Le train d'atterrissage a été déployé à 300 pieds, et si vous êtes intéressé par le train d'atterrissage, j'ai écrit une fois une réponse complète sur le déploiement du train d'atterrissage.
Le point de toucher des roues visé était de 2500 pieds sur la piste à une vitesse de 195 nœuds pour les orbiteurs légers, ou de 205 nœuds pour les orbiteurs lourds (à + 5 / -10 nœuds).
La goulotte de traînée (un ajout effectué au début des années 90) serait déployé peu de temps après le toucher du train principal, mais pas plus vite que 195 nœuds, et parfois ils attendaient le toucher du train avant en cas de vent de travers. Il serait largué à 60 nœuds pour s'assurer que le mécanisme de fixation de la goulotte ne heurte pas et n'endommage pas les moteurs principaux.
Contrôle
(par exemple, comment la navette a-t-elle pu modifier son attitude? )
Au début, l'orbiteur est toujours contrôlé comme un vaisseau spatial, en utilisant des jets RCS pour contrôler l'attitude. Au fur et à mesure que la pression dynamique (q-bar) augmente, les surfaces aérodynamiques commencent à devenir actives et les jets RCS s'arrêtent comme suit:
- q-bar = 0,5 livres / pied 2 sup > (psf), les elevons commencent à jouer le rôle de trim.
- q-bar = 2 psf, les elevons commencent à agir comme des surfaces de contrôle actives.
- q-bar = 10 psf, les jets de roulis RCS sont désactivés.
- q-bar = 40 psf, les jets de pas RCS sont désactivés.
- Mach 10, le speedbrake s'ouvre sur un pré- programme programmé pour agir comme compensateur de tangage.
- Mach 5, le gouvernail devient actif, agissant initialement comme compensateur d'aileron.
- Mach 1, les jets de lacet RCS sont désactivés.
Navigation
(par exemple, comment la navette savait-elle où elle se trouvait?)
La navigation, en termes de NASA, signifie essentiellement savoir où vous êtes (le guidage répond à la question "comment puis-je arriver là où je veux aller?"). Lors de l'entrée, la navette utilisait principalement des unités de navigation inertielle, qui étaient alignées à l'aide d'un suivi d'étoiles avant la brûlure de désorbitation. À mesure qu'il se rapprochait du site d'atterrissage, il pouvait également intégrer des signaux GPS et / ou TACAN dans les données de navigation. L'OV-105 (alias la navette spatiale Endeavour) avait trois unités GPS installées et aucun TACAN, tandis que les autres orbiteurs avaient trois TACAN et une unité GPS.
Sur le HAC, entre 15 km et 20 km d'altitude, l'orbiteur capterait le système d'atterrissage à micro-ondes (MLS), qui agit en quelque sorte comme un ILS de très haute précision. À partir de là, ils sont capables de déterminer leur position avec une précision et une précision élevées. Une fois acquis, cela devient la principale source de données de navigation pour le reste du vol.
Sur les vidéos d'atterrissage, vous pouvez en fait voir exactement quand ils prennent MLS parce que la bande d'altitude devient une sorte de saccadée, puis saute un peu et devient lisse. Par exemple, regardez ici à environ 20 km (la bande d'altitude est celle de droite).
En dessous de 5000 pieds, l'orbiteur a également pu utiliser un altimètre radar pour des informations d'altitude.
C'est probablement plus d'informations que vous ne cherchiez, mais si vous avez des questions sur des choses que je n'ai pas couvertes ou sur lesquelles je n'ai pas donné suffisamment de détails, n'hésitez pas à demander questions distinctes pour ceux-ci.