Vous trouverez ci-dessous les informations sur l'un des premiers prototypes de Paul Moller, également auteur du «Volantor», maintenant à la tête de Freedom-Motors, une société spécialisée dans les moteurs à combustion rotatifs Wankel. Moller a construit ses machines volantes avec des ventilateurs entraînés par des moteurs rotatifs Wankel, cependant, il semble préférable d'avoir des moteurs électriques pour les ventilateurs de levage et de propulsion, et une sorte de système hybride pour générer de l'énergie, les Wankels sont très bons en termes de rapport poids / puissance et de sécurité. Je dirais que le Moller et l'Helikar sont exactement un quadricoptère, et comme cette machine, et le modèle utilitaire / le support de brevet, il s'agit des jouets que nous connaissons tous, c'était probablement le poulet des Quadcopters jouets contemporains, les jouets d'aujourd'hui étant les œufs.
La corde et la grue derrière le Moller: «soucoupe volante», Avro Canada n'a pas réussi à en faire voler une, ce n'est pas pour garder la machine en l'air, mais une mesure de sécurité, si vous regardez, vous » Vous remarquerez que la corde n'est pas sous tension lorsque la machine est en l'air, ce qui signifie que la machine vole d'elle-même et n'est pas accrochée à la grue.
Les prototypes Bell Textron / X-22 et Curtiss-Wright X-19 peuvent être considérés aussi très proches d'un quadcopter.
Une équipe espagnole: FuVex, a conçu un prototype nommé: 'HeliKar', également proche d'un quadricoptère de grande taille. YouTube comprend une vidéo sur une invention allemande nommée: «Volocopter VC200», Terrafugia a proposé une autre «voiture volante», ainsi que Zee. Aero l'a fait, ils ont dessiné un concept de voiture volante VTOL qui pourrait être garée entre deux voitures ordinaires dans un parking de marché (voir: «SlashGear»). Aero-X d'Aerofex en est un autre. Fipsi est impliqué dans le développement d'une voiture volante à quatre ventilateurs, comme cité dans «Advanced System Engineering», SUSB Expo 2014.
«Future Transportation» cite ce qu'ils considèrent: «Les 10 meilleures voitures volantes». Krossblade a proposé le SkyProwler et le SkyCruiser, le gros problème dans une voiture volante semble remplir dans le même design les exigences de poids et de sécurité pour une voiture et un avion. Ford a publié des dessins pour une: «Aero-car». CNN rapporte à propos de Fly Citycopter, par E Galvani.
Mechanix Illustrated, mars 1957 comprend un: «Soucoupe volante», conçue par Peter Nofi, la puissance provient d'un moteur à six pistons plats, et Popular Mechanix, français editon, sept 1961, un dessin similaire: 'Rotavion', par Ben Kaufman. Mechanix Illustrated, janvier 1962, pp 70-73, parle d'un appareil VTOL ayant 3 ventilateurs enveloppés déplacés par une turbine.
En ce qui concerne les précurseurs historiques, la machine du film de 1961 de William Witney: 'Master of the World », basé sur deux romans de Jules Verne:« Master of the World », et:« Robur the Conqueror », pourrait facilement être considéré comme une multi-hélice:« Quadcopter ». Si: `` Fly by wire '', a réussi à maintenir les conceptions aéroportées intrinsèquement instables et instables, il ne peut y avoir aucune limite à ce qui pourrait être accompli avec une technologie de contrôle numérique qui est actuellement vendue dans les jouets à partir d'environ 20 $.
Une société basée en Hongrie: 'Flike', et le nom de la Hongrie ne vient pas de 'Hunger', mais de: 'Huns', vient de présenter un hélicoptère à trois hélices 'piloté', la vidéo est signée par Bay Zoltan.
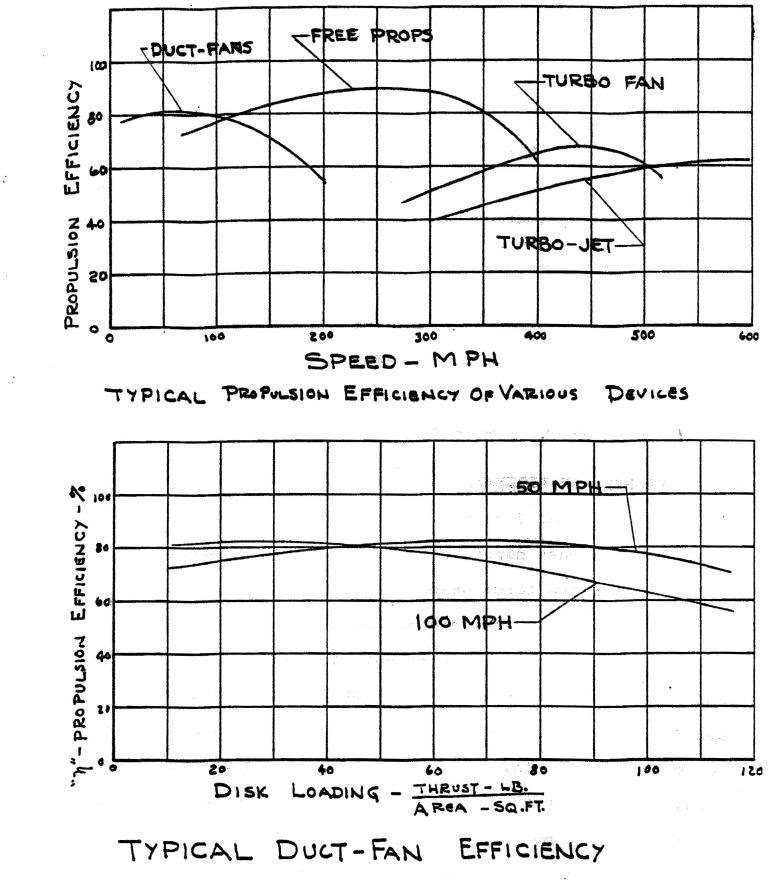
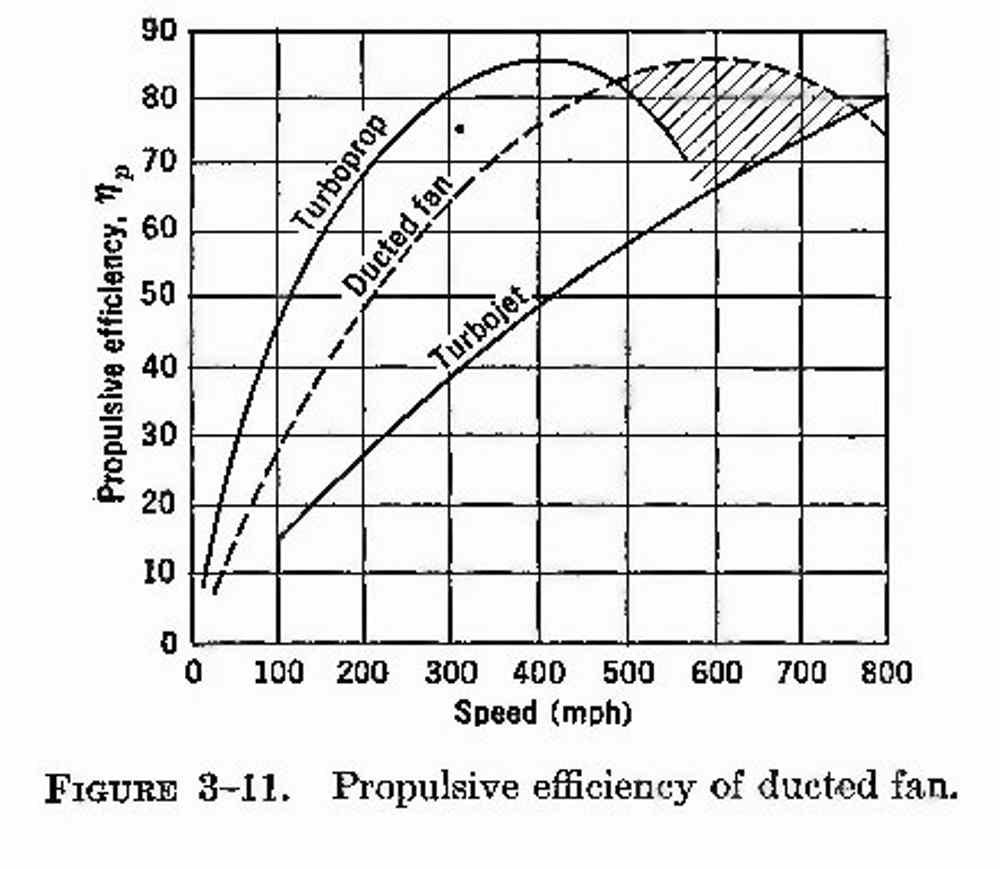
Est-ce que les plates-formes volantes, les appareils pour une personne, le ventilateur canalisé ci-dessous, testés par l'armée américaine, appartiennent à la classe: 'Quadcopter'?. De plus, plusieurs agencements de machines volantes à ailes inclinables et annulaires ont été testés, la liste des avions conceptuels et non conventionnels ouvre la voie à de nombreux livres, mais le Web tue ce type de publications papier.
'SkyProwler', est une autre approche, une conception mixte de quadricoptère et d'aile fixe.
Bensen B-12 (voir `` Aerofiles '') est un exemple de 1961 de machine de style quadricoptère à plusieurs rotors (plutôt à plusieurs hélices), le brevet US49820151 concerne la conception multi-ventilateurs de P. Moller et le brevet CA1264714 concerne un: `` Robotique ou plateforme volante télécommandée », également par P. Moller. Tous les brevets sont accessibles et téléchargeables gratuitement sur: 'Espacenet'
Y a-t-il une raison pour laquelle les jouets Quadcopter ne peuvent pas être augmentés en taille, même en utilisant le même logiciel pour contrôler les moteurs et la stabilité?
Merci. + salut
Vol d'essai Moller M200
Helikar
Hoverbike P2 de Malloy Aeronautics